















Последние новости




Статьи
Разбираем мир 2124 года со спойлерами!
Третий том фэнтезийной эпопеи об очередной «игре престолов»

Зак Снайдер наконец показал экшен не хуже «Звёздных войн». В конце!


Петербургский художник — о том, сложно ли придумывать смешные вещи, как традиционная живопись может довести до нервного срыва и почему срисовывать — не стыдно.

Недалекое будущее. Управляемый термоядерный синтез подарил человечеству дешевую энергию, прорыв в генетике позволил создавать новых, усовершенствованных людей. В этом безмятежном мире происходит нечто чудовищное: два научных центра в Китае и Европе исчезают без следа, […]

Кого люди повстречают на других планетах — зелёных человечков, воинственные треножники или разумный океан?

Дорама придется по душе как фанатам вселенной, так и тем, кто с ней только начинает знакомство.


Обретайте силу САМОУВАЖЕНИЯ, точите пиксельный меч и заваривайте любой из двух десятков сортов чая Рамоны Флауэрс!
Разбираем мир 2124 года со спойлерами!
Третий том фэнтезийной эпопеи об очередной «игре престолов»
Зак Снайдер наконец показал экшен не хуже «Звёздных войн». В конце!
Петербургский художник — о том, сложно ли придумывать смешные вещи, как традиционная живопись может довести до нервного срыва и почему срисовывать — не стыдно.
Недалекое будущее. Управляемый термоядерный синтез подарил человечеству дешевую энергию, прорыв в генетике позволил создавать новых, усовершенствованных людей. В этом безмятежном мире происходит нечто чудовищное: два научных центра в Китае и Европе исчезают без следа, […]
Кого люди повстречают на других планетах — зелёных человечков, воинственные треножники или разумный океан?

Дорама придется по душе как фанатам вселенной, так и тем, кто с ней только начинает знакомство.

Обретайте силу САМОУВАЖЕНИЯ, точите пиксельный меч и заваривайте любой из двух десятков сортов чая Рамоны Флауэрс!

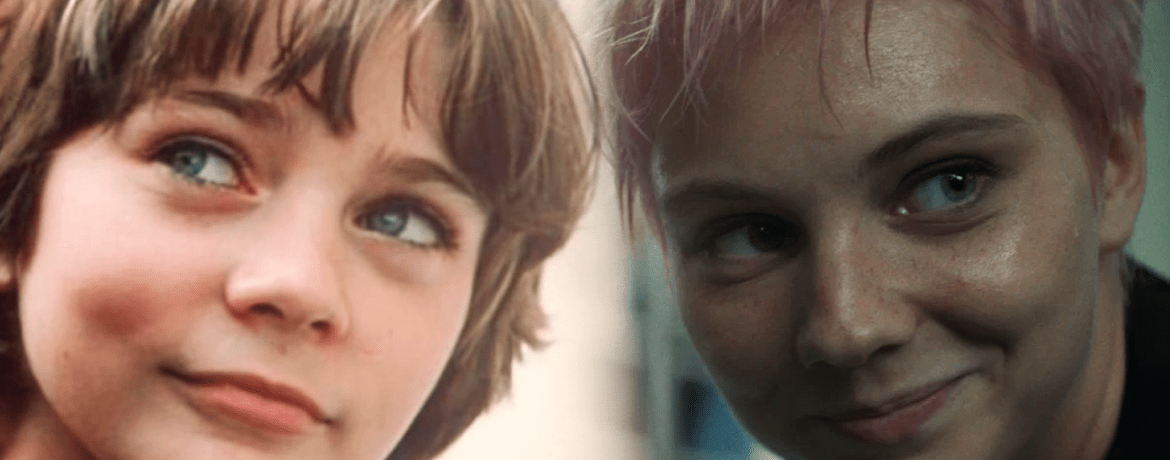
Мультфильмы, фильмы и сериалы о девочке из будущего. Угадайте, на каком месте новый?


Пролог, где описывается один день из жизни города и появляется главная героиня, Алис.

Есть ли к чему придраться, или всё идеально? Пробуем разобраться.

Славянское фэнтези для матёрых фанатов

Увлекательный сюжет и затягивающая густая атмосфера нивелируются посредственным техническим исполнением.
Собрание альтернативной литературы

Америку раздирает вражда, журналистов убивают, а люди принимают ужасы войны за «фейк ньюс».

Российская художница — о трудностях создания обложек, любви к писательству и уникальном стиле

Ещё одна попытка деконструировать троп «дамы в беде»
Отрывок, в котором Терри договаривается о гонорарах, пишет с Нилом «Благие знамения» и едет в отпуск
Что мы знаем о популярных звёздных системах из фильмов, книг и сериалов?